机械臂硬件连接
本文档以GLUON桌面型六轴机械臂为例,展示如何连接机械臂,以及在PC端运行ROS的过程。
硬件要求
PC电脑环境要求
- Ubuntu 18.04 操作系统
- CPU: 双核2GHz或更高
- 内存: 2GB或更高
- 硬盘:2GB或更高
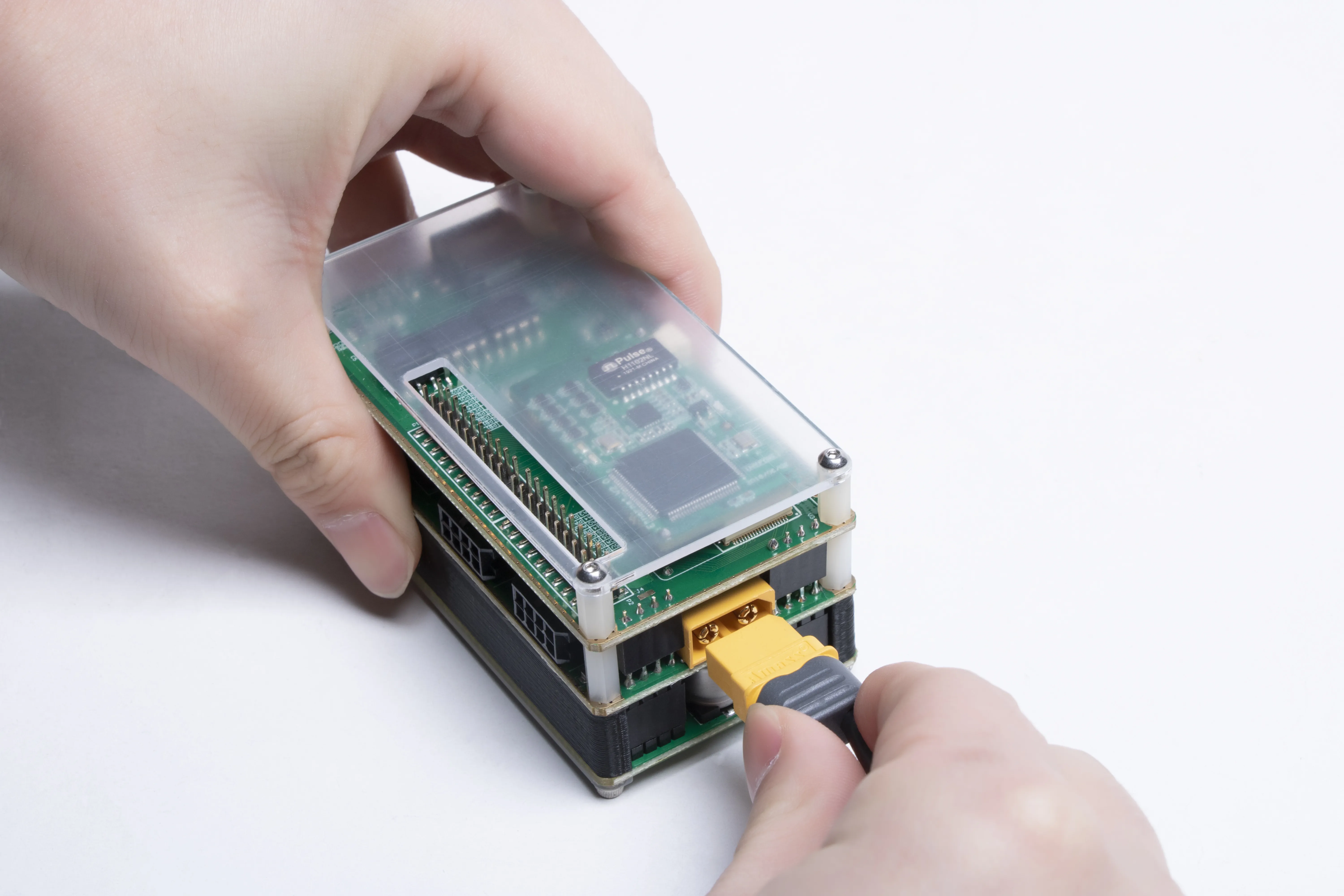
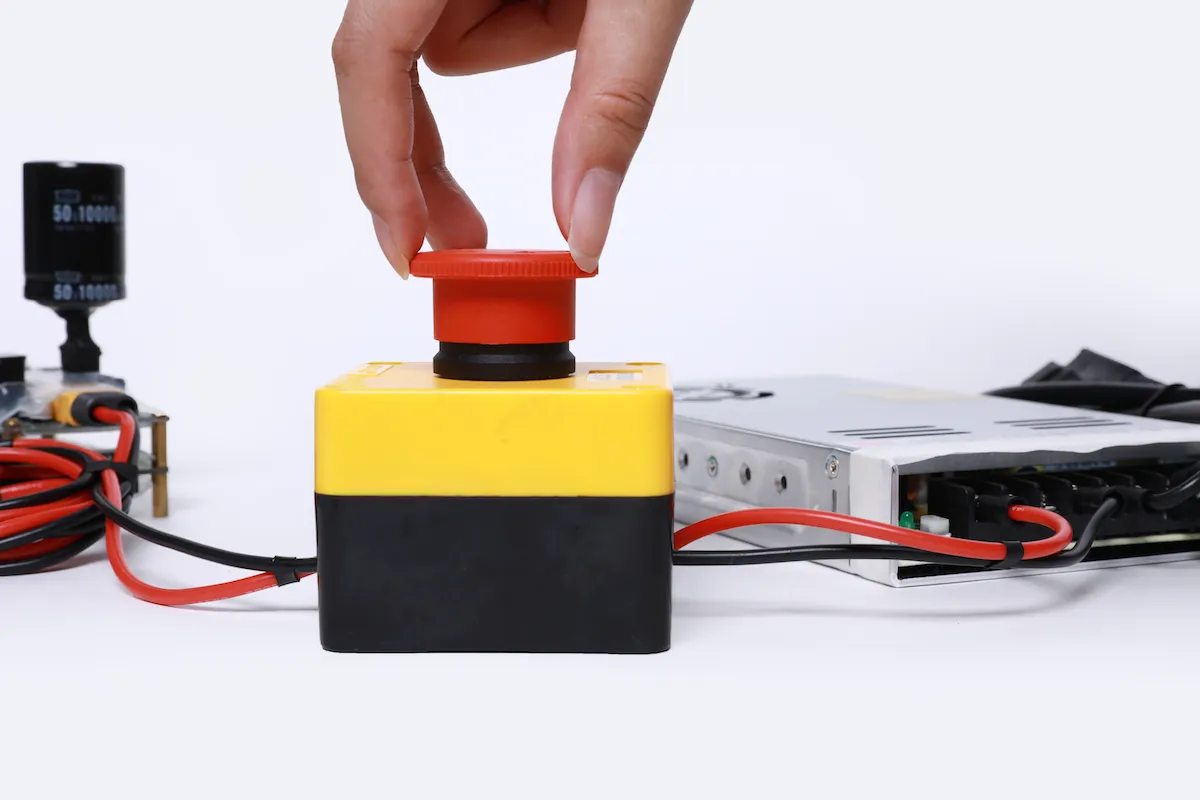
第一步:连接电源
注意
连接电源前请保证电源处于关闭状态。
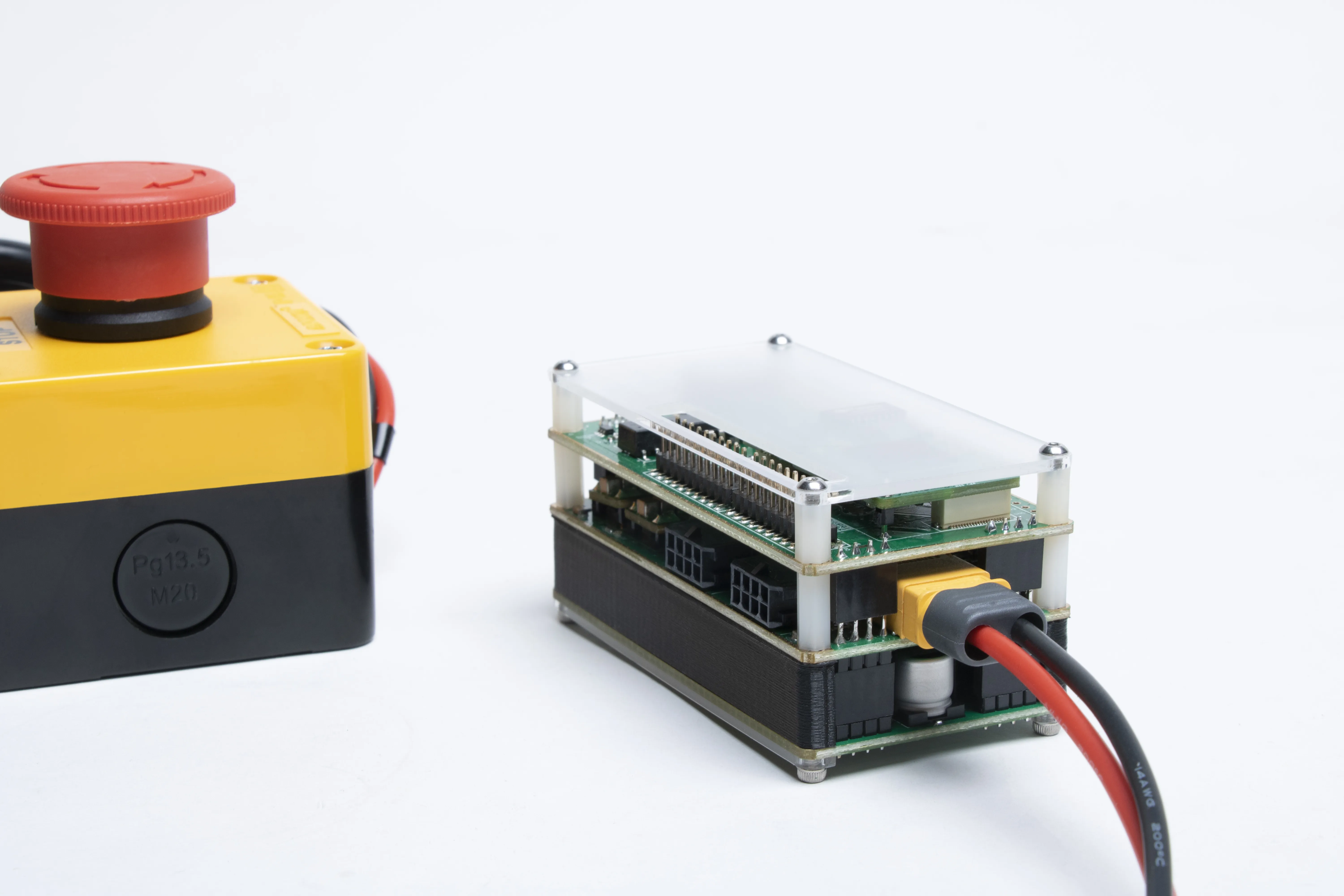
连接电源与ECB
连接完成(如下图)
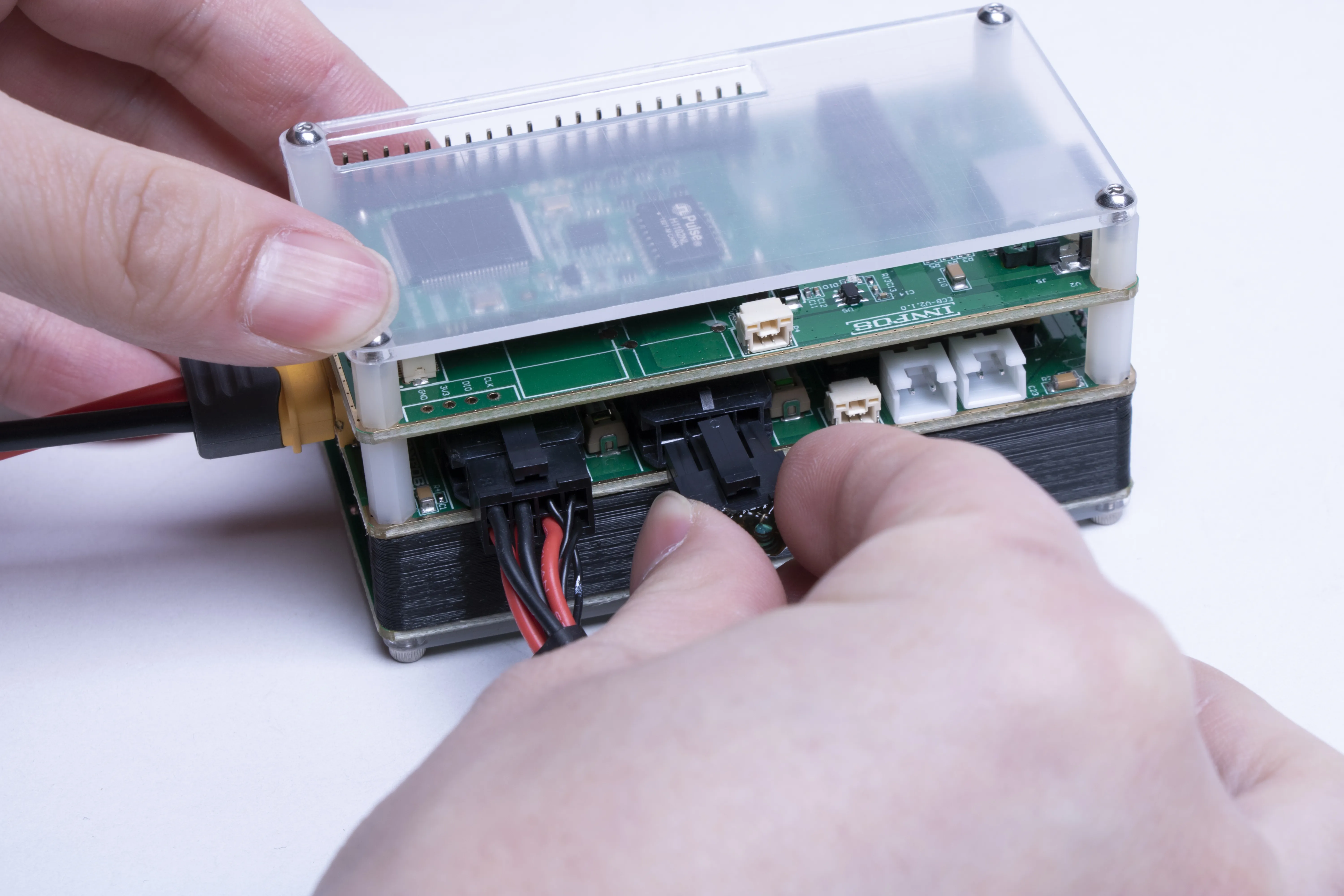
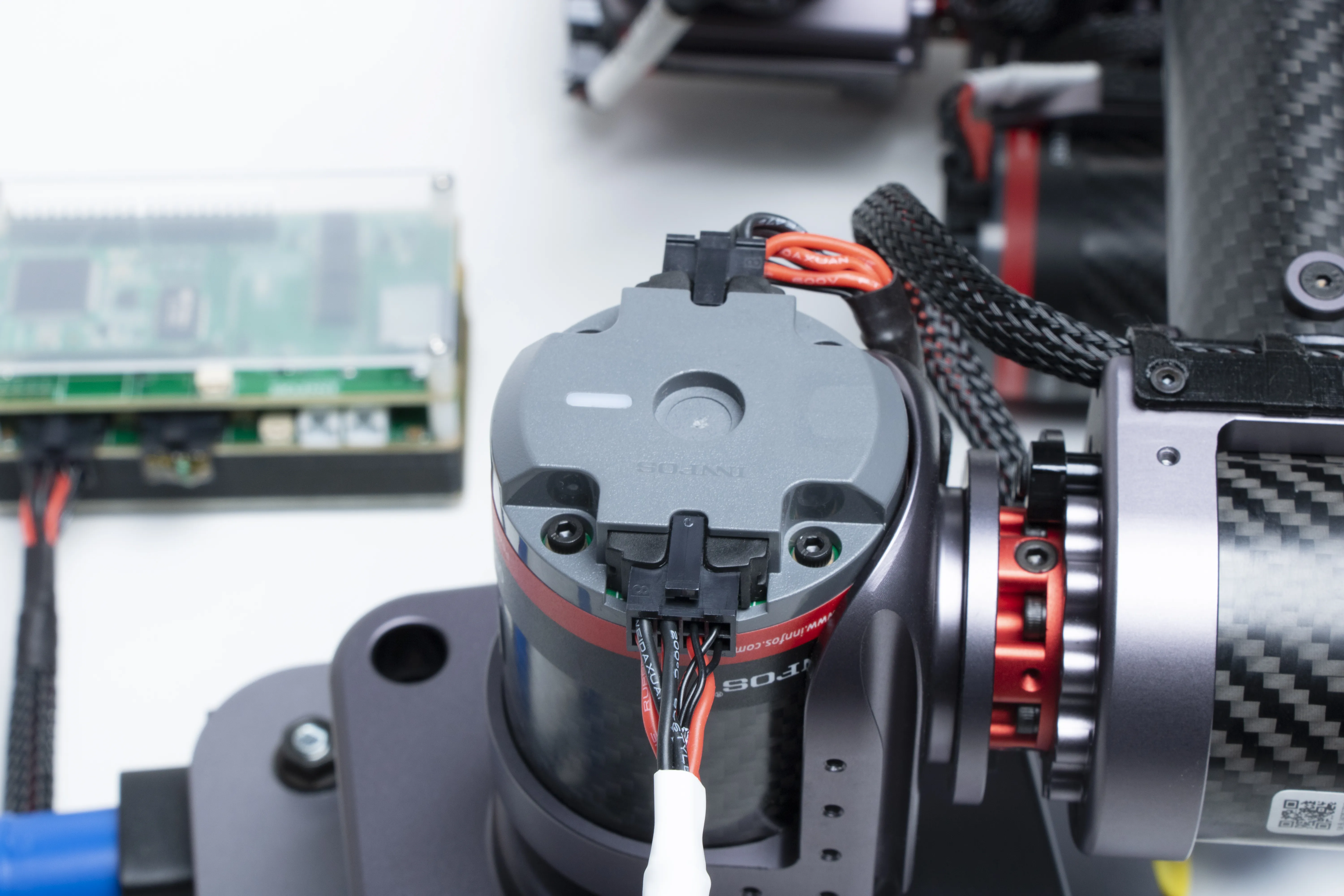
第二步:连接执行器及其配件
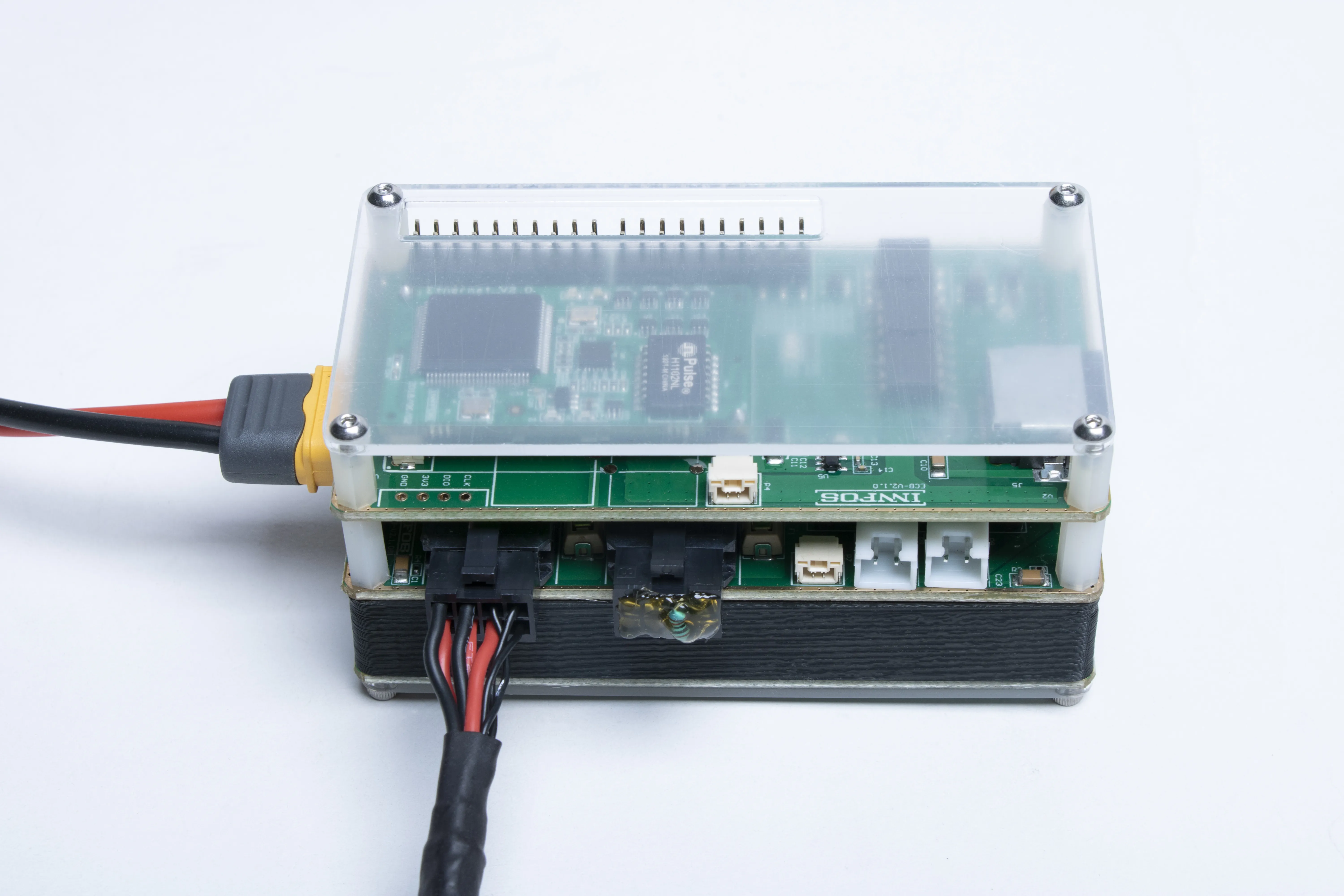
连接执行器综合线缆
连接线缆完成(如下图)
第三步:连接机械臂
用执行器连接线连接ECB与执行器
第四步:连接电脑
用网线连接ECB与电脑

第五步:连接后整体视图

第六步:开启电源
上电以后,执行器LED状态灯会变成黄色闪烁,启动执行器后,LED会变成绿色闪烁,这时就可�以与执行器进行通信了。如果执行器内部出现错误,LED灯会变为红色闪烁,请检查执行器错误代码。