仿真与控制
ECB 默认IP 地址是192.168.1.30, PC 的IP 地址需要配置为同网段的192.168.1.1xx;运行demo前,需要确保机械臂在正确的零位位置。
Rviz 控制模式
roslaunch gluon display.launch
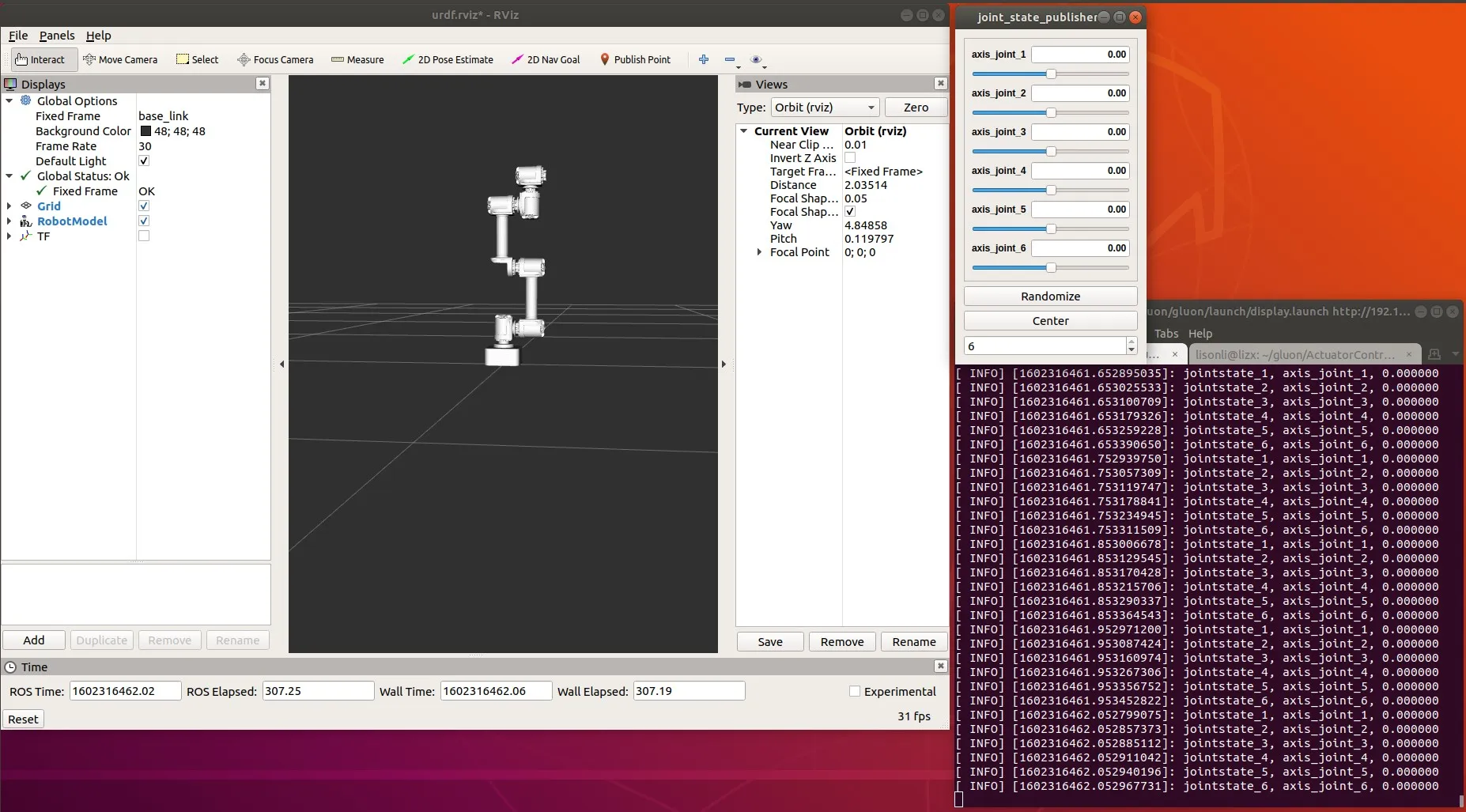 正确运行后,在rviz界面中可以看到gluon 机械臂urdf模型,拖拉joint_state_publisher窗口的滑动条即可控制机械臂运动,界面中的模型和真实机械臂联动 。
正确运行后,在rviz界面中可以看到gluon 机械臂urdf模型,拖拉joint_state_publisher窗口的滑动条即可控制机械臂运动,界面中的模型和真实机械臂联动 。
Moveit + Rviz控制模式
roslaunch gluon_moveit_config ub_demo.launch
这个demo 在rviz展示gluon 模型,在界面中拖拽至目标点或设置Goal State(预设值),点击按钮Plan -> Execute或 Plan and Execute, 我们可以看到gluon 模型运动到目标位置的运动轨迹(真机同步联动)。
Moveit教程实例
roslaunch moveit_tutorials move_group_interface_tutorial.launch
需要在ub_demo的基础上运行,提供了joint_state space 和 Cartesian 笛卡尔空间路径规划例子。